My master thesis was a great way to introduce myself into the field of telepresence and virtual headset control.
kivent-robotic-visualiser (krv) documentation
Links
Frameworks used
The 2D robot simulation program is written in Python 3.5 and uses mainly GUI module kivy and its counterpart for game logic the kivent module.
Using kivent module complex physics, graphics, and game environment was created using only Python language the low-level parts of physics interactions are written as wrappers in Cython utilizing the cymunk – python port of 2d physics engine Chipmunk2D.
The compiling and installation of the kivy and kivent modules from source codes can be done using the playbook.yml file (using ansible-playbook is an installer program) or getting help from online forums and official pages.
Běžný work-flow s verzovacím systémem git – pro úplné začátečníky
Do předmětu Rozpoznávání, který korigujeme na škole, jsme napsali běžný work-flow s gitem – pro úplné začátečníky. Takže pokud chcete vědět jestli mát první komitovat a pak až pullovat nebo naopak tak se můžete začíst 
AHK gr4comboAll – shortcut window
Part of my AHK script is also a gr4comboAll which is a hotkey to generate this gui. I can choose any file or anything to appear here.

Odpad v Brně zpracovávaný společností SAKO

Pořád si myslíte, že třídění nemá smysl? Že vytříděné kontejnery stejně smíchají a spálí takže je to jedno? Teď už vám můžu říct, hlupáci, že by se to nikomu nevyplatilo! Aneb soupis polopravd omylů a mýtů o odpadu uvedených na pravou míru.
Python + Gamepad = CLI grabber + drawille = CLI stick direction visualiser
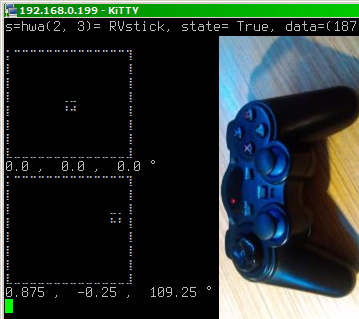 So I am creating a robot gr4dalek with a Mecanum drive. I thought omni-drive — I can drive in all directions. When on manual I need to give angle direction and speed. So gamepad. Also, keep it simple, I didn’t want to use pygame, tell me more about bloat processing.
So I am creating a robot gr4dalek with a Mecanum drive. I thought omni-drive — I can drive in all directions. When on manual I need to give angle direction and speed. So gamepad. Also, keep it simple, I didn’t want to use pygame, tell me more about bloat processing.
Proč jsem si vybral Blender?

3D prints: Handger = Hand hanger, Boobolder = boob holder…
Just look at it!
Automatizovaná tabulka pro známkování bodovaných prací
Gdyby stejně jako moje milá někdo potřeboval známkovat písemky podle dosaženého počtu bodů tak jsem vytvořil plně automatizovanou tabulku.
goo.gl/Ho0C47
Robot Dalek
Rozhodl jsem se ze si postavim robota pro ucast na Robotickem dni v Praze.
Prvni jsem musel vybrat typ podvozku..po dlouhem premysleNi jsem vybral Mecanum.. Protoze proc ne jdyz uz mam tu 3d tiskarnu proc ji nevyuzit..
