So if you try to create multiple common handlers via lambda functions, you get screwed as the lambdas are optimized out. In the end all the interrupts calls the last lambda callback function.
How to overcome this?
So if you try to create multiple common handlers via lambda functions, you get screwed as the lambdas are optimized out. In the end all the interrupts calls the last lambda callback function.
How to overcome this?
Aby jsme se mohli kvadrukoptérou zabírat různá zákoutí okolní reality, je potřeba ji upevnit do aktivního aktuátorovaného závěsu čili gimbalu. Jeden velmi levný gimbal je možné vytvořit celkem jednoduše.
Dyž už radím jednomu, tak proč né všem 🙂
 front BT module JY-MCU BT BOARD V1.04 |
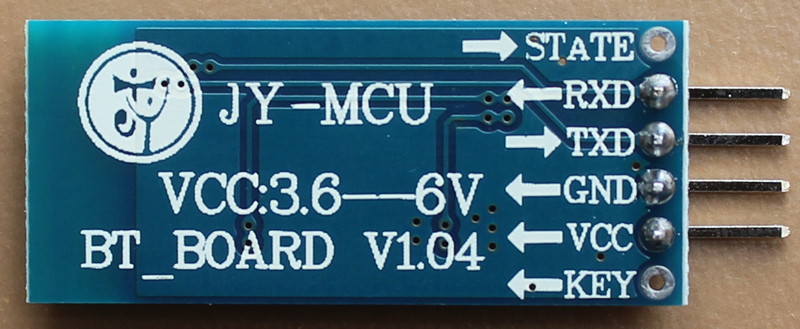 back BT module JY-MCU BT BOARD V1.04 |
Je to perfektní malé udělátko které Vám može ušetřit pár metrů káblíků 🙂 Na ebayi ho seženete okolo 100Kč
Jo mimochodem mám doma 3d tiskárnu.. leží mi sestavená na stole už asi 4 měsíce.. a pořád nemám čas přidělat poslední část a to sice vyhřívanou podložku.. a nastavit konečně parametry tak aby mi to PLA vytisklo krásně.
Celkově tiskárna výjde asi na 6500Kč podle toho kde seženete díly.
You would like to get STM32 MCU going under windows without any sharware-like limitation –> to use with open source SW?
Narazil jsem na zajímavý návod jak si udělat „bezpečný“ osciloskop z běžného androidfonu, který však díky své podstatě bude zobrazovat pouze proměnný signál (AC Coupling).